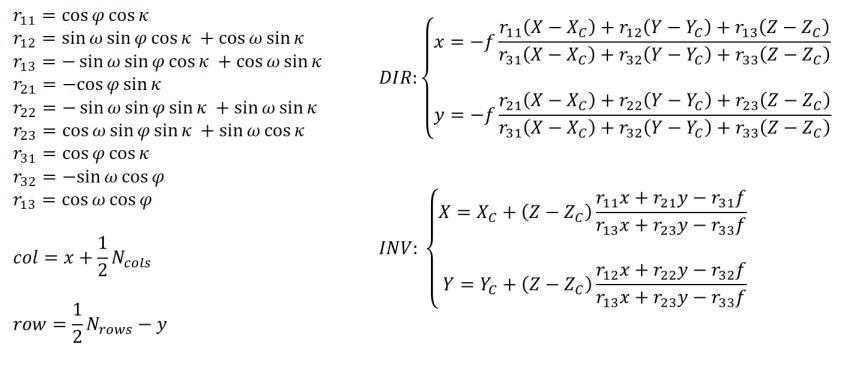
Camera Intrinsic Data (Focal Ncols Nrows)
Exterior Orientation (Xc Yc Zc Omega Phi Kappa)
Input X Y Z (col row Z for inverse)
Output col row (X Y for inverse)